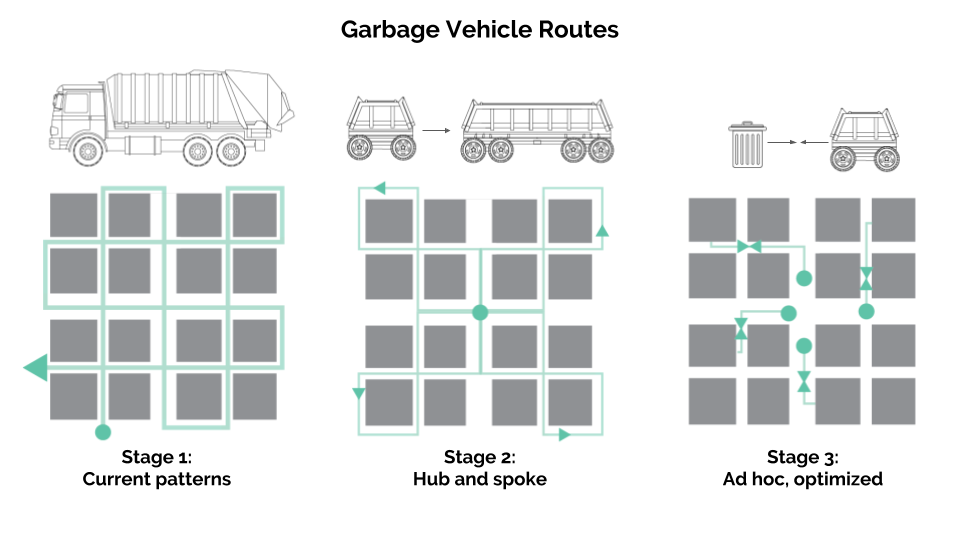

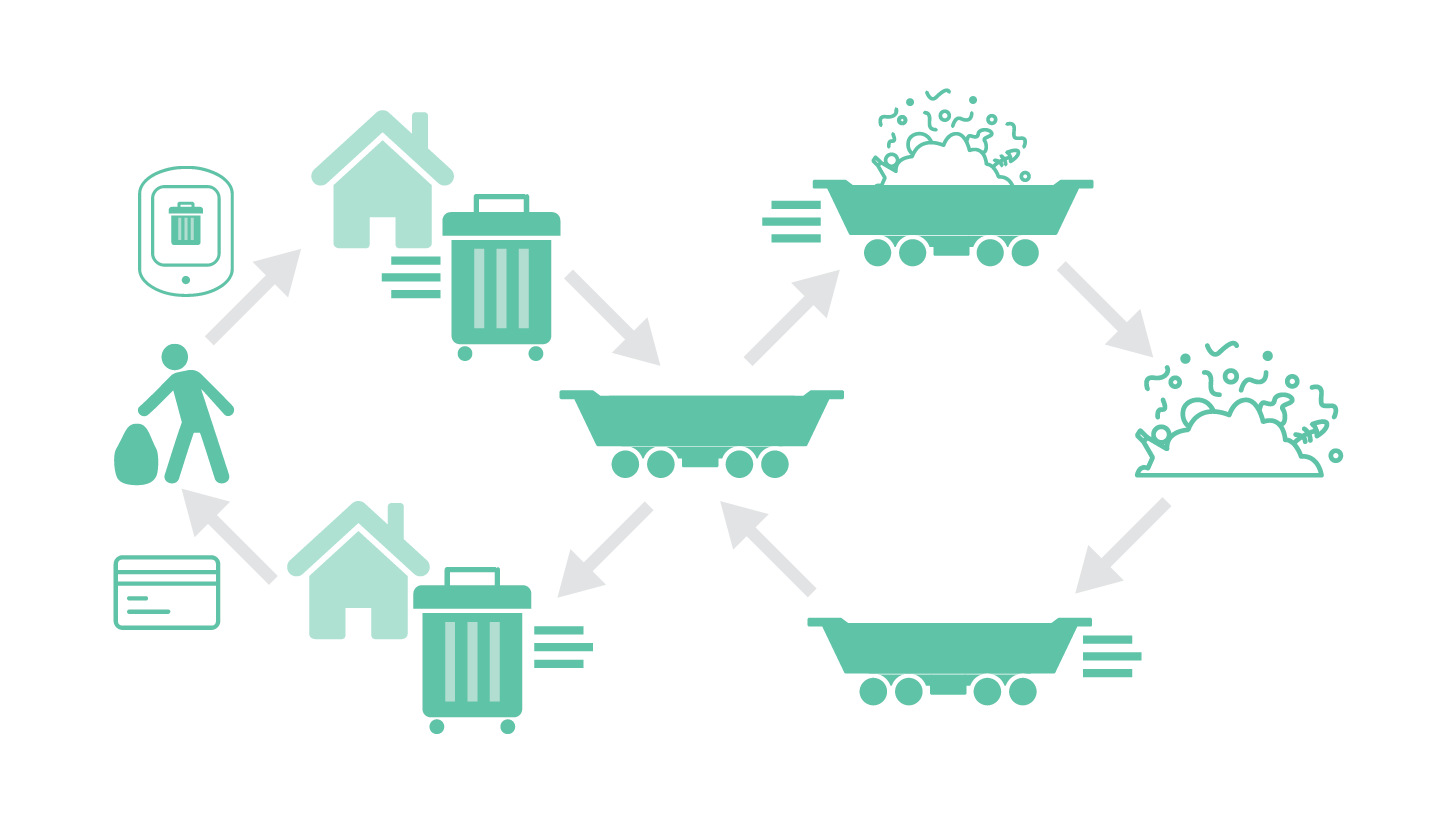


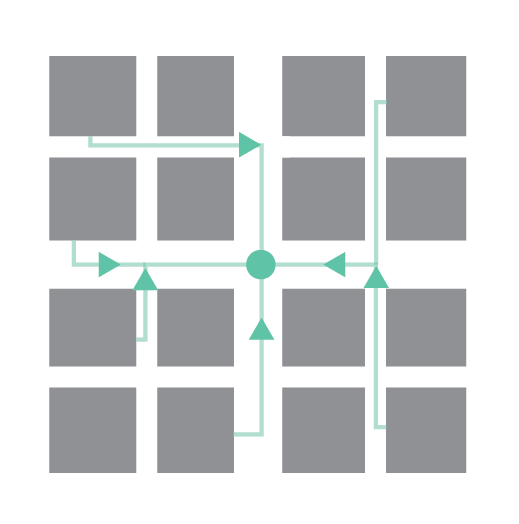
The diagrams above show our proposed evolution of trash truck routes as autonomous technology allows the truck to evolve from an over-sized vehicle driving each street by columns and rows, to a hub an spoke system as the vehicles get smaller, to finally an ad-hoc route system determined by trash removal needs. When the trash can itself becomes an autonomous vehicle to transport waste, it can navigate increasingly narrow paths to move waste from residences to the large vehicles waiting outside neighborhoods. Those large vehicles (which currently have to navigate residential streets) will only have to carry trash from less dense areas to the landfills.
Challenges Posed By The Streets

Narrow streets
The design of the street and density of houses can hinder efficient trash pick-up. Narrow streets are more difficult to navigate in a Sanitation Vehicle. Our design starts with an autonomous trash truck akin to those used in Barcelona today, but in later stages, we envision autonomous trash cans driving themselves to meet the larger trucks outside of narrow, residential areas.
dense housing
Streets with a high density of housing units requires more frequent stops to pick-up resulting in the vehicle taking more time to pick up trash. Again, in the final stage of our design, autonomous trash cans will take themselves to pick-up points where larger trucks will collect the garbage and drive it to landfills.


on-street parking
The presence of on-street parking poses several challenges to sanitation workers. Not only are workers concerned about hitting a parked vehicle in the narrow street environment, it can also be cumbersome to pick up trash when it is lost in between parked cars. With smaller, autonomous trash cans, the role of the sanitation worker will shift from trash collector to city beautification expert.
“I live to see people change their habits, see them treat their street and their city with respect.”